MCQ
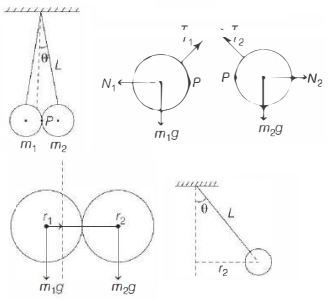
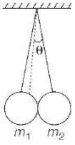
Two spherical objects each of radii $R$ and masses $m_1$ and $m_2$ are suspended using two strings of equal length $L$ as shown in the figure $(R << L)$. The angle $\theta$ which mass $m_2$ makes with the vertical is approximately
- A$\frac{m_1 R}{\left(m_1+m_2\right) L}$
- ✓$\frac{2 m_1 R}{\left(m_1+m_2\right) L}$
- C$\frac{2 m_2 h}{\left(m_1+m_2\right) L}$
- D$\frac{m_2 R}{\left(m_1+m_2\right) L}$