Question 11 Mark
Motion in two dimensions, in a plane can be studied by expressing position, velocity and acceleration as vectors in Cartesian co-ordinates $\text{A}=\text{A}_\text{x}\hat{\text{i}}+\text{A}_\text{y}\hat{\text{j}}$ where $\hat{\text{i}}$ and $\hat{\text{j}}$ are unit vector along x and y directions, respectively and $A_x$ and $A_y$ are corresponding components of A Fig. Motion can also be studied by expressing vectors in circular polar co-ordinates as $\text{A}=\text{A}_\text{r}\hat{\text{r}}+\text{A}_\theta\hat{\theta}$ where $\hat{\text{r}}=\frac{\text{r}}{\text{r}}=\cos\theta\hat{\text{i}}+\sin\theta\hat{\text{j}}$ and $\hat{\theta}=-\sin\theta\hat{\text{i}}+\cos\theta\hat{\text{j}}$ are unit vectors along direction in which ‘r’ and ‘$\theta$’ are increasing.
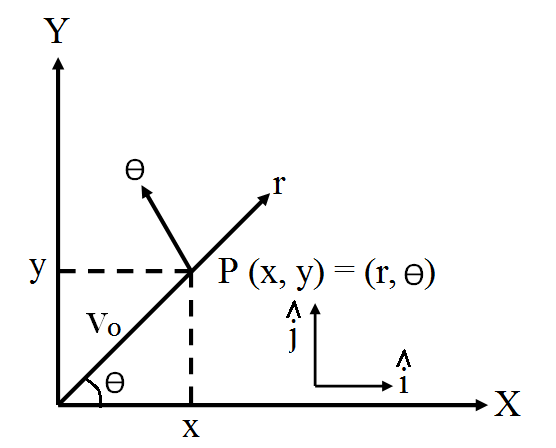
- Express $\hat{\text{i}}$ and $\hat{\text{j}}$ in terms of $\hat{\text{r}}$ and $\hat{\theta}$.
- Show that both $\hat{\text{r}}$ and $\hat{\theta}$ are unit vectors and are perpendicular to each other.
- Show that $\frac{\text{d}}{\text{dt}}(\hat{\text{r}})=\omega\hat{\theta}$ where $\omega=\frac{\text{d}\theta}{\text{dt}}$ and $\frac{\text{d}}{\text{dt}}(\hat{\text{r}})=-\omega\hat{\text{r}}$
- For a particle moving along a spiral given by $\text{r}=\text{a}\theta\hat{\text{r}}$ , where a = 1 (unit), find dimensions of ‘a’.
- Find velocity and acceleration in polar vector represention for particle moving along spiral described in (d) above.
Answer
$\hat{\theta}=-\sin\theta\hat{\text{i}}+\cos\theta\hat{\text{j}}\cdots(\text{ii})$
Multiplying Eq.(i) by $\sin\theta$ and Eq. (ii) with $\cos\theta$ and adding
$\Rightarrow\hat{\text{r}}\sin\theta+\hat{\theta}\cos\theta$$=\sin\theta\cdot\cos\theta\hat{\text{i}}+\sin^2\theta\hat{\text{j}}+\cos^2\theta\hat{\text{j}}-\sin\theta\cdot\cos\theta\hat{\text{i}}$
$=\hat{\text{j}}(\cos^2\theta+\sin^2\theta)=\hat{\text{j}}$
$\hat{\text{r}}\sin\theta+\hat{\theta}\cos\theta=\hat{\text{j}}$
By Eq.(i) $\text{x}\cos\theta-$Eq. (ii) $\text{x}\sin\theta$
$\text{n}(\hat{\text{r}}\cos\theta-\hat{\theta}\sin\theta)=\hat{\text{i}}$
$\Rightarrow\theta=90^\circ,$ angle between $\hat{\text{r}}$ and $\hat{\theta}$.
$=-\sin\theta\cdot\frac{\text{d}\theta}{\text{dt}}\hat{\text{i}}+\cos\theta\cdot\frac{\text{d}\theta}{\text{dt}}\hat{\text{j}}$
$=\omega[-\sin\theta\hat{\text{i}}+\cos\theta\hat{\text{j}}$ $\Big[\because\theta=\frac{\text{d}\theta}{\text{dt}}\Big]$
$\Rightarrow[\text{a}]=\text{L}=[\text{M}^0\text{L}^1\text{T}^0]$
Velocity $\text{v}=\frac{\text{dr}}{\text{dt}}=\frac{\text{d}\theta}{\text{dt}}\hat{\text{r}}+\theta\frac{\text{d}}{\text{dt}}\hat{\text{r}}$
$=\frac{\text{d}\theta}{\text{dt}}\hat{\text{r}}+\theta\frac{\text{d}}{\text{dt}}[(\cos\theta\hat{ \text{i}}+\sin\theta\hat{\text{j}})]$
$=\frac{\text{d}\theta}{\text{dt}}\hat{\text{r}}+\theta\Big[(-\sin\theta\hat{\text{i}}+\cos\theta\hat{\text{j}})\frac{\text{d}\theta}{\text{dt}}\Big]$
$=\frac{\text{d}\theta}{\text{dt}}\hat{\text{r}}+\theta\hat{\theta}\omega=\omega\hat{\text{r}}+\omega\theta\hat{\theta}$
By differentiating this equation, we get
Acceleration,
$\text{a}=\frac{\text{d}\theta}{\text{dt}}[\omega\hat{\text{r}}+\omega\theta\hat{\theta}]$
$=\frac{\text{d}}{\text{dt}}\Big[\frac{\text{d}\theta}{\text{dt}}\hat{\text{r}}+\frac{\text{d}\theta}{\text{dt}}(\theta\hat{\theta})\Big]$
$=\frac{\text{d}^2\theta}{\text{dt}^2}\hat{\text{r}}+\frac{\text{d}\theta}{\text{dt}}\cdot\frac{\text{d}\hat{\text{r}}}{\text{dt}}+\frac{\text{d}^2\theta}{\text{dt}^2}\theta\hat{\theta}+\frac{\text{d}\theta}{\text{dt}}\frac{\text{d}}{\text{dt}}(\theta\hat{\theta})\frac{\text{d}^2\theta}{\text{dt}^2}\hat{\text{r}}$
$+\omega[-\sin\theta\hat{\text{i}}+\sin\theta\hat{\text{j}}]+\frac{\text{d}^2\theta}{\text{dt}^2}\theta\hat{\theta}+\frac{\omega\text{d}}{\text{dt}}(\theta\hat{\theta})$
$=\frac{\text{d}^2\theta}{\text{dt}^2}\hat{\text{r}}+\omega^2\hat{\theta}+\frac{\text{d}^2\theta}{\text{dt}^2}\times\theta\hat{\theta}+\omega^2\hat{\theta}+\omega^2\theta(-\hat{\text{r}})$
$\Big(\frac{\text{d}^2\theta}{\text{dtv}^2}-\omega^2\Big)\hat{\text{r}}+\Big(2\omega^2+\frac{\text{d}^2\theta}{\text{dt}^2}\theta\Big)\theta$
View full question & answer→- According to the problem, unit vector
$\hat{\theta}=-\sin\theta\hat{\text{i}}+\cos\theta\hat{\text{j}}\cdots(\text{ii})$
Multiplying Eq.(i) by $\sin\theta$ and Eq. (ii) with $\cos\theta$ and adding
$\Rightarrow\hat{\text{r}}\sin\theta+\hat{\theta}\cos\theta$$=\sin\theta\cdot\cos\theta\hat{\text{i}}+\sin^2\theta\hat{\text{j}}+\cos^2\theta\hat{\text{j}}-\sin\theta\cdot\cos\theta\hat{\text{i}}$
$=\hat{\text{j}}(\cos^2\theta+\sin^2\theta)=\hat{\text{j}}$
$\hat{\text{r}}\sin\theta+\hat{\theta}\cos\theta=\hat{\text{j}}$
By Eq.(i) $\text{x}\cos\theta-$Eq. (ii) $\text{x}\sin\theta$
$\text{n}(\hat{\text{r}}\cos\theta-\hat{\theta}\sin\theta)=\hat{\text{i}}$
- $\hat{\text{r}}\cdot\hat{\theta}=(\cos\theta\hat{\text{i}}+\sin\theta\hat{\text{j}})\cdot(-\sin\theta\hat{\text{i}}+\cos\theta\hat{\text{j}})$
$\Rightarrow\theta=90^\circ,$ angle between $\hat{\text{r}}$ and $\hat{\theta}$.
- Given, $\hat{\text{r}}=\cos\theta\hat{\text{i}}+\sin\theta\hat{\text{j}}$
$=-\sin\theta\cdot\frac{\text{d}\theta}{\text{dt}}\hat{\text{i}}+\cos\theta\cdot\frac{\text{d}\theta}{\text{dt}}\hat{\text{j}}$
$=\omega[-\sin\theta\hat{\text{i}}+\cos\theta\hat{\text{j}}$ $\Big[\because\theta=\frac{\text{d}\theta}{\text{dt}}\Big]$
- Given,$\text{r}=\text{a}\theta\hat{\text{r}},$ here writing dimension.
$\Rightarrow[\text{a}]=\text{L}=[\text{M}^0\text{L}^1\text{T}^0]$
- Given, $\text{a}=1$ unit, $\text{r}=\theta\hat{\text{r}}=\theta[\cos\theta\hat{\text{i}}+\sin\theta\hat{\text{j}}]$
Velocity $\text{v}=\frac{\text{dr}}{\text{dt}}=\frac{\text{d}\theta}{\text{dt}}\hat{\text{r}}+\theta\frac{\text{d}}{\text{dt}}\hat{\text{r}}$
$=\frac{\text{d}\theta}{\text{dt}}\hat{\text{r}}+\theta\frac{\text{d}}{\text{dt}}[(\cos\theta\hat{ \text{i}}+\sin\theta\hat{\text{j}})]$
$=\frac{\text{d}\theta}{\text{dt}}\hat{\text{r}}+\theta\Big[(-\sin\theta\hat{\text{i}}+\cos\theta\hat{\text{j}})\frac{\text{d}\theta}{\text{dt}}\Big]$
$=\frac{\text{d}\theta}{\text{dt}}\hat{\text{r}}+\theta\hat{\theta}\omega=\omega\hat{\text{r}}+\omega\theta\hat{\theta}$
By differentiating this equation, we get
Acceleration,
$\text{a}=\frac{\text{d}\theta}{\text{dt}}[\omega\hat{\text{r}}+\omega\theta\hat{\theta}]$
$=\frac{\text{d}}{\text{dt}}\Big[\frac{\text{d}\theta}{\text{dt}}\hat{\text{r}}+\frac{\text{d}\theta}{\text{dt}}(\theta\hat{\theta})\Big]$
$=\frac{\text{d}^2\theta}{\text{dt}^2}\hat{\text{r}}+\frac{\text{d}\theta}{\text{dt}}\cdot\frac{\text{d}\hat{\text{r}}}{\text{dt}}+\frac{\text{d}^2\theta}{\text{dt}^2}\theta\hat{\theta}+\frac{\text{d}\theta}{\text{dt}}\frac{\text{d}}{\text{dt}}(\theta\hat{\theta})\frac{\text{d}^2\theta}{\text{dt}^2}\hat{\text{r}}$
$+\omega[-\sin\theta\hat{\text{i}}+\sin\theta\hat{\text{j}}]+\frac{\text{d}^2\theta}{\text{dt}^2}\theta\hat{\theta}+\frac{\omega\text{d}}{\text{dt}}(\theta\hat{\theta})$
$=\frac{\text{d}^2\theta}{\text{dt}^2}\hat{\text{r}}+\omega^2\hat{\theta}+\frac{\text{d}^2\theta}{\text{dt}^2}\times\theta\hat{\theta}+\omega^2\hat{\theta}+\omega^2\theta(-\hat{\text{r}})$
$\Big(\frac{\text{d}^2\theta}{\text{dtv}^2}-\omega^2\Big)\hat{\text{r}}+\Big(2\omega^2+\frac{\text{d}^2\theta}{\text{dt}^2}\theta\Big)\theta$
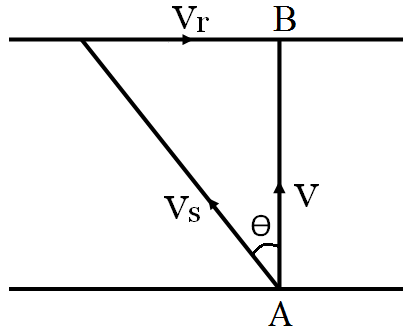
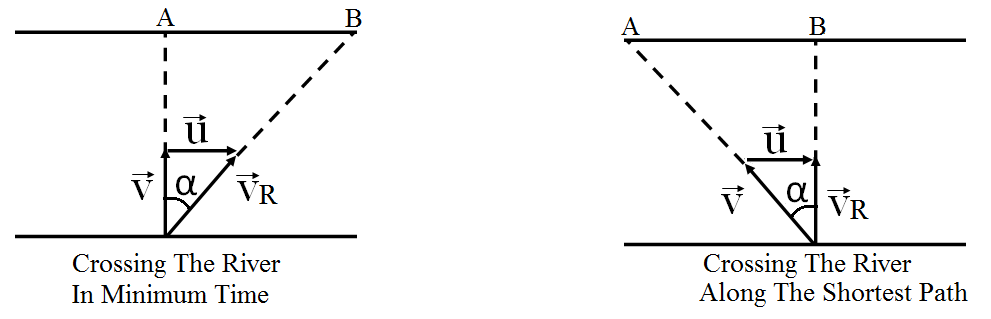
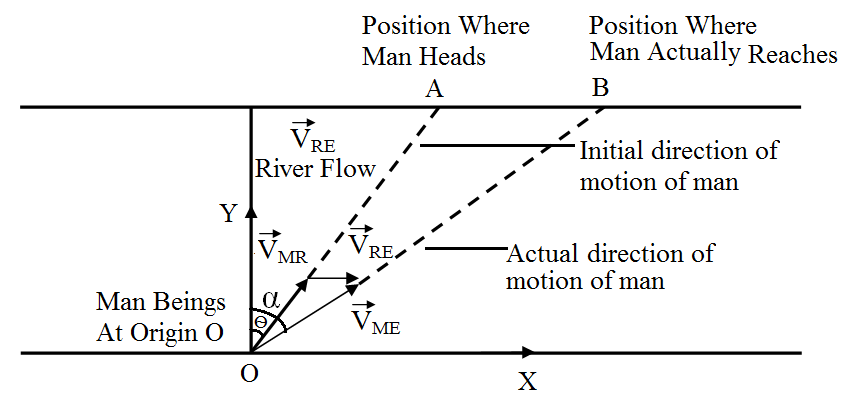 In unit vector notiation.$\vec{\text{V}}_\text{MR}=\text{v}\sin\theta\hat{\text{i}}+\text{v}\cos\theta\hat{\text{j}};\vec{\text{V}}_\text{ME}=\text{u}\hat{\text{i}}$ as $\vec{\text{V}}_\text{ME}=\vec{\text{V}}_\text{MR}+\vec{\text{V}}_\text{RE}$
In unit vector notiation.$\vec{\text{V}}_\text{MR}=\text{v}\sin\theta\hat{\text{i}}+\text{v}\cos\theta\hat{\text{j}};\vec{\text{V}}_\text{ME}=\text{u}\hat{\text{i}}$ as $\vec{\text{V}}_\text{ME}=\vec{\text{V}}_\text{MR}+\vec{\text{V}}_\text{RE}$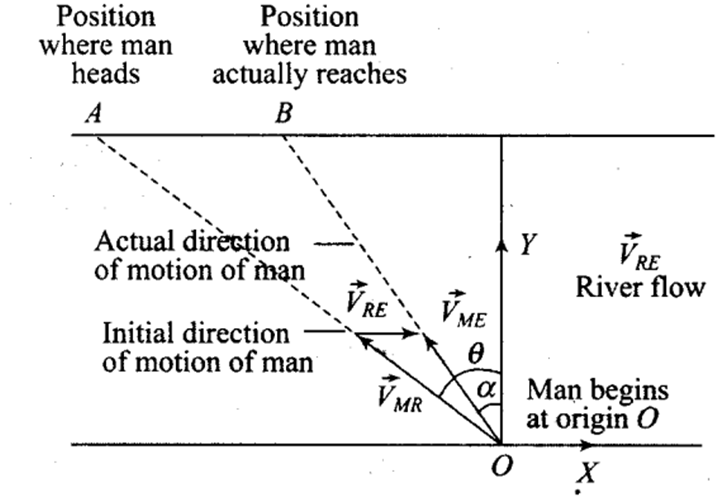
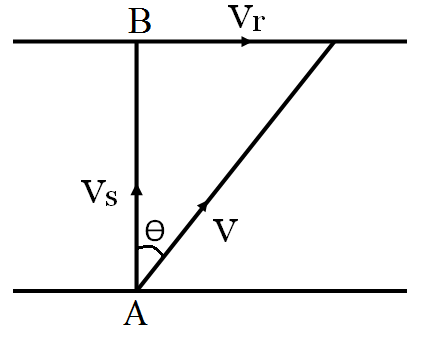 $\text{v}=\sqrt{\text{v}^2_\text{r}+\text{v}^2_\text{s}}=\sqrt{(3)^2+(4)^2}$
$\text{v}=\sqrt{\text{v}^2_\text{r}+\text{v}^2_\text{s}}=\sqrt{(3)^2+(4)^2}$