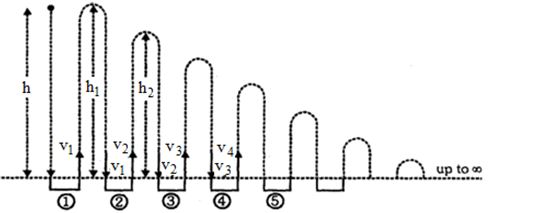
એક બોલ $ 'h' $ ઉંચાઈ પરથી મુક્ત રીતે પતન કરે છે. આ બોલ સતત પટકાઈને પાછો ફરે છે. તો $ 'n' $ વાર પાછો ફર્યા પછી બોલ વડે પ્રાપ્ત થતી ઉંચાઈ અને $n$ વાર પાછો ફરવા માટે બોલને લાગતો સમય શોધો.
Diffcult
Download our app for free and get started
b
ન્યુટન ના સૂત્ર પરથી \(({{\vec v}_2}-{{\vec v}_1})=e({{\vec u}_2}-{{\vec u}_2})\)
ન્યુટન ના સૂત્ર પરથી \(({{\vec v}_2}-{{\vec v}_1})=e({{\vec u}_2}-{{\vec u}_2})\)
\({\text{v}}\,\, = \,\,\sqrt {{\text{2gh}}} \) અહી , \({{\vec v}_2}\, = \,\,0,\,\,{{\vec u}_2}\, = \,\,0\) (સ્થિર સ્થિતિ આગળની સપાટી )
\('n'\) વાર પાછો ફર્યા પછી બોલ વડે હાંસલ થતી ઊચાઇ :
\(V_1=ev⇒\sqrt {{\text{2gh}}}_1=e\sqrt {{\text{2gh}}}⇒h_1=e^2hv_2=e^2v\)
\(\sqrt {{\text{2gh}}}_2=e^2\sqrt {{\text{2gh}}}⇒h_2=e^4h\)
તેવી જ રીતે \(,h_n=e^{2n}h\)
\(n\) વાર પાછો ફરવા માટે લાગતો સમય
\({h_1}\, = \,\,{e^2}h\,\,\,\, \Rightarrow \,\,\,\frac{1}{2}gt_1^2\,\, = \,\,{e^2}\frac{1}{2}\,\,g{t^2}\,\,\, \Rightarrow \,\,\,t_1^2\,\, = \,\,{e^2}{t^2}\,\,\,\, \Rightarrow \,\,\,{t_1}\, = \,\,et\,\,\,{t_1}\, = \,\,e\,\sqrt {\frac{{2h}}{g}} \,\,\,\,...........(i)\)
\({h_2}\, = \,\,{e^4}h\,\,\,\,\, \Rightarrow \,\,\,\,\frac{1}{2}g{t_2}^2\,\, = \,\,{e^4}(\frac{1}{2}\,\,g{t^2})\,\,\,\, \Rightarrow \,\,\,t_2^2\, = \,\,{e^4}{t^2}\,\,\,\, \Rightarrow \,\,\,{t_2}\, = \,\,{e^2}t\,\,\, \Rightarrow \,\,{t_2}\, = \,\,{e^2}\,\sqrt {\frac{{2h}}{g}} \,\,\,.........(ii)\)
તેવી જ રીતે \(,\,\,\,{{\text{t}}_{\text{n}}}\, = \,\,{e^n}\,\sqrt {\frac{{2h}}{g}} \,\,\,\,\therefore \,\,\,\,\,{t_n}\, = \,\,{e^n}t\)

Download our appand get started for free
Experience the future of education. Simply download our apps or reach out to us for more information. Let's shape the future of learning together!No signup needed.*
Similar Questions
- 1$50 g $ ની ગોળી $10 m/s $ ના વેગથી $950 gm$ ના સ્થિર બ્લોકમાં ધૂસીને સ્થિર થઇ જાય છે.તો તંત્ર કેટલા ................. $\%$ ગતિઊર્જા ગુમાવશે?View Solution
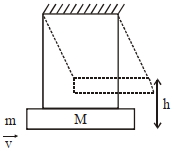
- 2$M=5.99 \,kg$ દળ ધરાવતું એક મોટું ચોસલું બે દળરહિત દોરીઓ વડે લટકાવવામાં આવેલ છે. $m=10\, g$ દળ ધરાવતી ગોળીને ચોસલાંમાં ફાયર (ફોડવામાં) કરવામાં આવે છે અને તે તેમાં ઘૂસી જાય છે. (ચોસલું$+$ગોળી) પછી ઉપર તરફ ગતિ કરે છે, આ દોલક (ચોસલું$+$ગોળી) તેમની માપના અંત્ય બિંદુ આગળ ક્ષણભાર સ્થિર થાય તે પહેલા તેમના દ્રવ્યમાન કેન્દ્ર શિરોલંબ દિશામાં $h=9.8\, cm$ ઊંચાઈએ પહોંચે છે. સંધાત પહેલા તરત જ ગોળીની ઝડપ ..... હશો. ($g =9.8\, ms ^{-2}$ લો.) ($m/s$ માં)View Solution
- 3પરમાણુના બે અણુઓ વચ્ચેની સ્થિતિઊર્જા $U(x) = \frac{a}{{{x^{12}}}} - \frac{b}{{{x^6}}}$ દ્વારા આપવામાં આવે છે; જ્યાં $a$ અને $b$ એ ધન અચળાંકો છે અને $x$ એ અણુઓ વચ્ચેનું અંતર છે. અણુ સ્થાયી સંતુલનમાં હશે જ્યારે .......View Solution
- 4$x -$ દિશામાં $2v$ જેટલી ઝડપથી ગતિ કરતો અને $m$ દળ ધરાવતો કણ $y-$ દિશામાં $v$ જેટલી ઝડપથી ગતિ કરતા બીજા $2m$ દળ ધરાવતા કણ સાથે અથડાય છે.આ અથડામણ જો સંપૂર્ણ અસ્થિતિસ્થાપક હોય,તો અથડામણ દરમિયાન ઊર્જામાં થતો પ્રત્યાશિત ફેરફાર ..................... $\%$ ની નજીક ( જેટલો ) હશે.View Solution
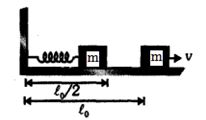
- 5$m$ દળનો એક ટુકડો $k$ સ્પ્રિંગ અચળાંકવાળી એક સ્પ્રિંગ કે જેનો એક છેડો દિવાલ સાથે જોડાયેલ છે તેની વિરૂદ્ધમાં ધકેલાય છે. આકૃતિમાં દર્શાવ્યા પ્રમાણે એક ટુકડો ઘર્ષણરહિત ટેબલ પર સરકે છે. સ્પ્રિંગની પ્રાકૃતિક લંબાઈ $l_0$ છે અને જ્યારે ટુકડો મુક્ત થાય છે ત્યારે તે તેની પ્રાકૃતિક લંબાઈની અડધી લંબાઈ જેટલી સંકોચાય છે તો ટુકડાનો અંતિમ વેગ કેટલો હશે ?View Solution
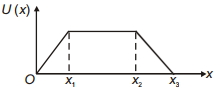
- 6એક તંત્રની સ્થિતિઊર્જા $U$ માં થતો ફેરાફાર એ આકૃતિમાં દર્શાવ્યા મુજબ છે. તો તંત્ર પર લાગતું બળ એ શ્રેષ્ઠ રીતે ક્યાં આલેખ મુજબ દર્શાવી શકાય?View Solution
- 7એક $m $ દળનો પદાર્થ અચળ બળ $F$ ની અસર હેઠળ પ્રારંભિક સ્થિર સ્થિતિએથી $t$ સમયમાં $v m/sec$ વેગ હાંસલ કરે છે દળનો જરૂરી પાવર કટેલો હશે ?View Solution
- 8એક સમક્ષિતિજ સમતલ પર $2m$ ત્રિજ્યાવાળી ગોળીય તકતી ગોઠવેલી છે. જેના અંતર્ગોળ પૃષ્ઠ પર $1 g$ દળનો એક કણ દોલીત ગતિ કરે છે. જો કણની ગતિની શરૂઆત સમક્ષિતિજ સમતલથી $1 cm $ ઉંચાઈએ આવેલી તકતી પરના એક બિંદુથી થાય છે અને ઘર્ષણ ગુણાંક $0.01$ છે. કણ સ્થિર સ્થિતિએ રહેલ અંતર્ગોળ પૃષ્ઠના નીચેના ભાગે આવે તે પહેલા તેણે કુલ ........ $m$ અંતર કાપ્યું હશે.View Solution
- 9એક $m_1$ દળનો કણ $v_1 $ વેગ સાથે ગતિ કરે છે અને બીજો $m_2$ દળનો કણ $V_2$ વેગ સાથે ગતિ કરે છે. તે બંનેનું વેગમાન સમાન છે પરંતુ તેમની જુદી જુદી ગતિ ઊર્જા અનુક્રમે $E_1$ અને $E_2$ છે. જો $m_1$ > $m_2$ હોય તો.......View Solution
- 10બે સમાન લાદીના ઢેફાઓને બાજુ બાજુએથી બે લાંબી દોરી વડે લટકાવેલા છે. એક બાજુ દોરવામાં આવે છે કે જેથી તેનું ગુરૂત્વકેન્દ્ર $h $ શિરોલંબ અંતર વધે છે. તેને મુક્ત કરવામાં આવે છે અને ત્યારે તે બીજા એક સાથે અસ્થિતિસ્થાપક રીતે સંઘાત પામે છે. તો આ સંયોજનના ગુરૂત્વકેન્દ્રથી વધેલા શિરોલંબ અંતર કેટલું હશે ?View Solution