એક પદાર્થ સ્થિર સ્થિતિમાં રહેલાં બીજા સ્થિર પદાર્થ સાથે સ્થિતિ સ્થાપક રીતે ત્રાંસી દિશામાં અથડાય છે. સંઘાત પછી તેઓ એકબીજાને .............. $^o$ ખૂણે ગતિ કરે.
Diffcult
Download our app for free and get started
c
\(X \) અક્ષ દિશામાં રેખીય વેગમાનનું સંરક્ષણ \(mu_1 = mv_1cos \theta _1 + mv2cos \theta_2 ⇒ u_1 = v_1cos \theta_1 + v2cos \theta_2 ……….(i)\)
\(X \) અક્ષ દિશામાં રેખીય વેગમાનનું સંરક્ષણ \(mu_1 = mv_1cos \theta _1 + mv2cos \theta_2 ⇒ u_1 = v_1cos \theta_1 + v2cos \theta_2 ……….(i)\)
\(Y \) - દિશામાં રેખીય વેગમાનનું સંરક્ષણ \(0 = mv_1sin \theta _1 - mv_2sin \theta _2 ⇒ 0 = v_1sin \theta_1 - v_2sin \theta_2 ………(ii)\)
ગતીઉર્જા નું સરક્ષણ \(\,\frac{{\text{1}}}{{\text{2}}}mu_1^2\,\, = \,\,\frac{1}{2}mv_1^2\,\, + \,\,\frac{1}{2}mv_2^2\,\,\,\,\, \Rightarrow \,\,\,\,\,u_1^2\,\, = \,\,v_1^2\,\, + \,\,v_2^2\,\,\,\,\,.........(iii)\)
\((i)^2 + (ii)^2 \) પરથી,
\( \Rightarrow \,\,{u_1}^2\,\, + \,\,0\,\, = \,\,{v_1}^2{\cos ^2}{\theta _1}\, + \,\,{v_2}^2{\cos ^2}{\theta _2}\, + \,\,2{v_1}{v_2}\,\cos {\theta _1}\,\cos {\theta _2}\,\, + \,\,{v_1}^2{\sin ^2}{\theta _1}\, + \,\,{v_2}^2{\sin ^2}{\theta _2}\, - \,\,2{v_1}{v_2}\sin {\theta _1}\sin {\theta _2}\)
\( \Rightarrow \,\,{u_1}^2\, = \,\,{v_1}^2({\cos ^2}{\theta _1}\, + \,\,{\sin ^2}{\theta _1})\,\, + \,\,{v_2}^2\,({\cos ^2}{\theta _2}\, + \,\,{\sin ^2}{\theta _2})\,\, + \,\,2{v_1}{v_2}(\cos {\theta _1}\,\cos {\theta _2}\, - \,\,\sin {\theta _1}\,\sin {\theta _2})\)
\( \Rightarrow \,u_1^2\, = \,\,v_1^2\, + \,\,v_2^2\, + \,\,2{v_1}{v_2}\,\cos \,({\theta _1}\, + \,\,{\theta _2})\,\,\,\,\,\,\{ \,\,\because \,\,{u_1}^2\, = \,\,{v_1}^2\, + \,\,{v_2}^2\,\,\} \)
\( \Rightarrow \,\,\cos \,({\theta _1}\, + \,\,{\theta _2})\,\, = \,\,0\,\, \Rightarrow \,\,{\theta _1}\, + \,\,{\theta _2}\,\, = \,\,{90^ \circ }\)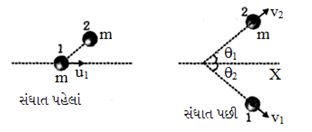

Download our appand get started for free
Experience the future of education. Simply download our apps or reach out to us for more information. Let's shape the future of learning together!No signup needed.*
Similar Questions
- 1$2kg$ ના પદાર્થનો વેગ $36km/h$ છે. $3kg$ ના સ્થિર રહેલા પદાર્થ સાથે અસ્થિતિસ્થાપક સંધાત થાય,તો ગતિઊર્જામાં થતો ઘટાડો.....$J$View Solution
- 2$L = \frac{{10}}{3}\,m$ લંબાઇની દોરી સાથે $1\,kg$ નો પદાર્થ બાંધીને શિરોલંબ વર્તુળાકાર પથ પર ભ્રમણ કરવવામાં આવે છે.દોરીમાં મહત્તમ અને ન્યુનતમ તણાવનો ગુણોત્તર $4$ છે,તો પદાર્થની મહત્તમ ઊંચાઇના બિંદુએ ઝડપ ...... $m/\sec$ હશે.View Solution
- 3એક સાદા લોલકની લંબાઈ $75 cm$ છે. જે શિરોલંબ અર્ધ વર્તૂળ દર્શાવે છે. જ્યારે તે મધ્યવર્તૂળ સ્થાનેથી પસાર થાય ત્યારે દડાનો વેગ કેટલો હશે ?View Solution
- 4$m$ દળનો પદાર્થ $v$ વેગથી તે જ દિશામાં $ kv$ વેગથી જતાં $nm $ દળના પદાર્થ સાથે અથડાતા,પ્રથમ પદાર્થ સ્થિર થાય,તો બીજા પદાર્થનો વેગView Solution
- 5$ {m_A} $ અને $ {m_B} $ દળના વેગ $ {v_A} $ અને $ {v_B} $ છે.અથડામણ પછી $ {m_A} $ અને $ {m_B} $ દળના વેગ $ {v_B} $ અને $ {v_A} $ હોય,તો $ \frac{m_A}{m_B} =$ _____View Solution
- 6$4m$ દ્રવ્યમાનના અને $u$ ઝડપતી ગતિ કરતો એક પદાર્થ $A$ એ $2m$ દ્રવ્યમાનના અને સ્થિર એવા એક પદાર્થ $B$ સાથે અથડાય છે. આ અથડામણ હેડ ઓન અને સ્થિતિસ્થાપક પ્રકૃતિની છે. અથડામણ પછી પદાર્થ $A$ વડે ગુમાવાતી ઊર્જાનો જથ્થો કેટલો હશે?View Solution
- 7$m$ દળનો એક પદાર્થ $v$ વેગથી પ્રારંભમાં સ્થિર સ્થિતિમાં રહેલો $2m$ દળના બીજા પદાર્થ સાથે હેડઓન સંઘાત કરે છે. સંઘાત પહેલા અને સંઘાત પછી સંઘાતી પદાર્થની ગતિ ઊર્જાનો ગુણોત્તર શું હશે ?View Solution
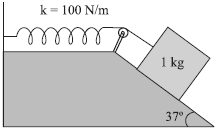
- 8આકૃતિ માં દર્શાવ્યા મુજબ ખરબચડા ઢાળ પર રાખેલ $1\; kg$ નો એક બ્લૉક, $100\;N m ^{-1}$ જેટલા સ્વિંગ અચળાંકવાળી સ્પ્રિંગ સાથે જોડેલ છે. ગિની ખેંચાયા પહેલાંની સામાન્ય પરિસ્થિતિમાં બ્લોકને સ્થિર સ્થિતિમાંથી મુક્ત કરવામાં આવે છે. બ્લૉક સ્થિર સ્થિતિમાં આવતા પહેલાં ઢાળ પર $10 \;cm$ જેટલું નીચે જાય છે. બ્લૉક અને ઢાળ વચ્ચેનો ઘર્ષણ-આંક શોધો. ધારો કે સ્પ્રિંગનું દળ અવગણ્ય છે અને ગરગડી ઘર્ષણરહિત છેView Solution
- 9$m$ દળનો એેક પદાર્થ એ એક દોરીની મદદ વડે $\frac{ g }{6}$ જેટલા અધોગામી પ્રવેગ સાથે અંતર $x$ કાપે તે રીતે છોડવામાં આવે છે. તો દોરી વડે થયેલ કાર્ય છેView Solution
- 10View Solutionનીચેનાં બે વિધાનો પર વિચાર કરો.
1. તંત્રના કણોનું રેખીય વેગમાન શૂન્ય હોય છે.
2. તંત્રના કણોની કુલ ગતિ-ઊર્જા શૂન્ય હોય છે.