$m_1$ અને $m_2$ દળ ધરાવતા બે પદાર્થને વજન રહિત દોરીના છેડે આકૃતિમાં દર્શાવ્યા મુજબ ગરગડી પરથી લટકાવેલ છે. $m_2 < m_1$ ગરગડી ઘર્ષણ રહિત અને વજન રહિત છે. આ બે પદાર્થથી બનતા તંત્રના દ્રવ્યમાન-કેન્દ્રનો પ્રવેગ.....

Diffcult
Download our app for free and get started
d
અહી દરેક પદાર્થ નો પ્રવેગ \({\text{a}}\,\, = \,\,\frac{{{{\text{m}}_{\text{1}}}\, - \,\,{m_2}}}{{{m_1}\, + \,\,{m_2}}}\,g\)
અહી દરેક પદાર્થ નો પ્રવેગ \({\text{a}}\,\, = \,\,\frac{{{{\text{m}}_{\text{1}}}\, - \,\,{m_2}}}{{{m_1}\, + \,\,{m_2}}}\,g\)
દ્રવ્યમાન કેન્દ્ર નો પ્રવેગ ,\(\,\mathop {{{\text{a}}_{{\text{cm}}}}}\limits^ \to \, = \,\,\frac{{{m_1}\,\mathop {{a_1}}\limits^ \to \, + \,\,{m_2}\,\mathop {{a_2}}\limits^ \to }}{{{{\text{m}}_{\text{1}}}\, + \,\,{m_2}}}\)
બંને પદાર્થ વિરુદ્ધ દિશા માં ગતિ કરતાં હોવા થી, \(\mathop {{{\text{a}}_{\text{1}}}}\limits^ \to \,\, = \,\,{\text{ - }}\,\,\mathop {{{\text{a}}_{\text{2}}}}\limits^ \to \,\, = \,\,{\text{a}}\,\)
\(\therefore \,\,{{\text{a}}_{{\text{cm}}}}\, = \,\,\frac{{{m_1}a\,\, - \,\,{m_2}a}}{{{m_1}\, + \,\,{m_2}}}\,\,\,\, = \,\,a\,\left( {\frac{{{m_1}\, - \,\,{m_2}}}{{{m_1}\,\, + \,\,{m_2}}}} \right)\,\)
\( = \,\,\left( {\frac{{{m_1}\, - \,\,{m_2}}}{{{m_1}\, + \,\,{m_2}}}} \right)\,\,\, \cdot \,g\,\,\,\left( {\frac{{{m_1}\, - \,\,{m_2}}}{{{m_1}\, + \,\,{m_2}}}} \right) = \,\,{\left( {\frac{{{m_1}\, - \,\,{m_2}}}{{{m_1}\, + \,\,{m_2}}}} \right)^2}\,g\)

Download our appand get started for free
Experience the future of education. Simply download our apps or reach out to us for more information. Let's shape the future of learning together!No signup needed.*
Similar Questions
- 1View Solutionફલાય વ્હીલને એવી રીતે બનાવવામાં આવે છે જેથી તેનું સંપૂર્ણ દળ તેની રીમ પર સંકેન્દ્રિત થયેલું હોય છે, કારણ કે......
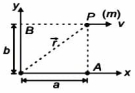
- 2એક કણ $x$ -અક્ષને સમાંતર સીધી રેખામાં અયળ વેગથી ગતિ કરી રહ્યો છે. સદિશ સ્વરૂપમાં ઊગમ બિંદુને અનુલક્ષીને કોણીય વેગમાન શોધો.View Solution
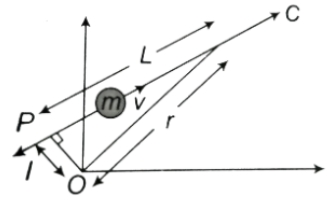
- 3$m$ દળ $v$ વેગથી $PC$ દિશામાં ગતિ કરે છે.તો તેનું કોણીય વેગમાન $O$ ને અનુલક્ષીને કેટલું થાય?View Solution
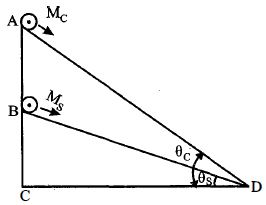
- 4આકૃતિમાં $M_c$ દળનું નળાકાર અને $M_s$ દળના ગોળાને અનુક્રમે બે ઢોળાવના બિંદુઓ $A$ અને $B$ પર મૂકેલા છે. જો તેઓ ઢોળાવ પર સરક્યાં વગર સમાન પ્રવેગથી ગતિ કરતાં હોય તો $\frac{{\sin \,{\theta _c}}}{{\sin \,{\theta _s}}}$ નો ગુણોત્તર કેટલો થાય?View Solution
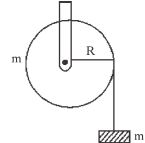
- 5$m $ દળ ધરાવતા પદાર્થને વજનરહિત દોરી વડે $m$ દળ અને $R$ ત્રિજયા ધરાવતા સમાંગી પોલા નળાકાર પર લટકાવવામાં આવે છે.જો દોરી નળાકાર પર સરકે નહિ તો તે સ્થિતિમાં આપેલ પદાર્થ કેટલા ગુરુત્વપ્રવેગથી નીચે પડશે?View Solution
- 6$2\, kg$ દળનો કોઈ કણ લીસ્સા સમક્ષિતિજ ટેબલ પર છે અને તે $0.6\, m$ ત્રિજ્યાના વર્તુળાકાર માર્ગ પર ગતિ કરે છે. જમીનથી ટેબલની ઊંચાઈ $0.8\, m$ છે. જો કણની કોણીય ઝડપ $12\, rad\, s^{-1}$ હોય તો વર્તુળના કેન્દ્રની એકદમ નીચે જમીન પર કોઈ બિંદુ ને અનુલક્ષીને તેના કોણીય વેગમાનની કિંમત ....... $kg\, m^2\,s^{-1}$ થાય.View Solution
- 7લીસા સમક્ષિતિજ ટ્રેક પર $v$ ઝડપે ગતિ કરતી એ લાંબી ટ્રોલીનાં એક છેડે એક બાળક ઊભો રહેલો છે, જો, બાળકએ ટ્રોલીનાં બીજા છેડાં તરફ $u$ ઝડપે દોડવાનું શરૂ કરે છે તો તંત્ર (ટ્રોલી+બાળક) નું દ્રવ્યમાન કેન્દ્ર કેટલી ઝડપે ગતિ કરશે ?View Solution
- 8$m$ દળનો એક કણ એ વેગ $v$ થી સમક્ષિતિજ સાથે $30^{\circ}$ નો ખૂણો બનાવીને પ્રક્ષિપ્ત ગતિ કરે છે. આ કણ જ્યારે મહત્તમ ઉંચાઈ પ્રાપ્ત કરે તે સમયે, ગતિની શરૂઆતના બિંદુની સાપેક્ષે કણના કોણીય વેગમાનનું મૂલ્ય ફેટલું હશે?View Solution
- 9ઘનગોળો ઘર્ષણ રહિત સપાટી પર રોલિંગ કરે છે. આકૃતિમાં દર્શાવ્યા પ્રમાણે સ્થાનાંતરીત વેગ $v\ \ m/s$ થી ગતિ કરીને ઢોળાવ વાળા સમતલ પર ચઢે છે. ત્યારે $v$ કેટલું હોવું જોઈએ ?View Solution
- 10એક ઘન ગોળો ગબડતી ગતિમાં છે.ગબડતિ ગતિ (લોટણ ગતિ) માં પદાર્થ સ્થાનાંતરીત ગતિઊર્જા $(K_t) $ અને ભ્રમણીય ગતિઊર્જા $(K_r)$ એક સાથે ધરાવે છે.આ ગોળા માટે $ K_t: (K_t+ K_r)$ નો ગુણોત્તર છે.View Solution