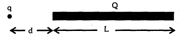
આકૃતિમાં બતાવ્યા પ્રમાણે $L$ લંબાઈના અને $Q$ વિદ્યુતભાર વાળા પાતળા અવાહક સળિયા (તેની લંબાઈ પર સમાન વિતરણ થયેલ છે.) ના એક છેડાથી અંતરે એક બિંદુવત વિદ્યુતભાર મૂકેલો છે. તે બંને વચ્ચેના વિદ્યુતબળનું મૂલ્ય શોધો.
Diffcult
Download our app for free and get started
c
સળિયાનો \(x\) લંબાઈનો સૂક્ષ્મ ઘટક કે જે આકૃતિમાં દર્શાવ્યા પ્રમાણે \(q\) બિંદુવત્ વિદ્યુતભારથી \(x\) અંતરે આવેલ છે. ઘટકને બિંદુવત્ વિદ્યુતભાર તરીકે લો.
\(q\) અને વિદ્યુતભાર ઘટક વચ્ચેનું બળ
સળિયાનો \(x\) લંબાઈનો સૂક્ષ્મ ઘટક કે જે આકૃતિમાં દર્શાવ્યા પ્રમાણે \(q\) બિંદુવત્ વિદ્યુતભારથી \(x\) અંતરે આવેલ છે. ઘટકને બિંદુવત્ વિદ્યુતભાર તરીકે લો.
\(q\) અને વિદ્યુતભાર ઘટક વચ્ચેનું બળ
\(dF\,\, = \,\,\frac{1}{{4\pi \,\,{ \in _0}}}\,\,\frac{{q\,dQ}}{{{x^2}}}\) પરંતુ \(dQ\,\, = \,\,(Q/L)dx\) તેથી \(dF\,\, = \,\,\frac{1}{{4\pi \,\,{ \in _0}}}\,\,\frac{{q\,Q\,dx}}{{L{x^2}}}\)
\(\therefore \,\,F\,\, = \,\,\frac{1}{{4\pi \,\,{ \in _0}}}\,\,\,\frac{{qQ}}{L}\,\,\int\limits_d^{(d\,\, + \,\,L)} {\,\,\,\frac{{dx}}{{{x^2}}}} \,\, = \,\,\frac{1}{{4\pi \,\,{ \in _0}}}\,\,\frac{{qQ}}{L}\,\,\left[ { - \frac{1}{x}} \right]_d^{(d\,\, + \,\,L)}\)
\( \Rightarrow \,\,F\,\, = \,\,\frac{1}{{4\pi \,\,{ \in _0}}}\,\,\frac{{qQ}}{L}\,\,\left[ {\frac{1}{d}\,\, - \,\,\frac{1}{{(d\,\, + \,\,L)}}} \right]\,\, = \,\,\frac{1}{{4\pi \,\,{ \in _0}}}\,\,\,\frac{{qQ}}{{d(d\, + \,\,L)}}\)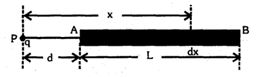

Download our appand get started for free
Experience the future of education. Simply download our apps or reach out to us for more information. Let's shape the future of learning together!No signup needed.*
Similar Questions
- 1બે વિદ્યુત ડાયપોલની ડાયપોલ મોમેન્ટ $P$ અને $64 \,P$ છે.આ બંને ડાયપોલને વિરુધ્ધ દિશામાં $25 \,cm$ અંતરે મૂકેલા છે.તો $P$ ડાયપોલ મોમેન્ટવાળા ડાયપોલથી કેટલા......$cm$ ના અંતરે વિદ્યુતક્ષેત્ર શૂન્ય થાય?View Solution
- 2કોઈ વિભાગનું વિદ્યુતક્ષેત્ર $\overrightarrow{ E }=\frac{2}{5} E _{0} \hat{ i }+\frac{3}{5} E _{0} \hat{ j }$ છે, જ્યાં $E _{0}=4.0 \times 10^{3}\, \frac{ N }{ C }$ છે. $Y - Z$ સમતલમાં $0.4 \,m ^{2}$ ક્ષેત્રફળ ધરાવતી સપાટીનું વિદ્યુતફ્લક્સ ....... $Nm ^{2} C ^{-1}$ હશે.View Solution
- 3View Solutionમિલ્કનના તેલના ટીપાના પ્રયોગમાં, તેલના ટીપા પર નીચેના પૈકી કયો વિદ્યુતભાર હાજર હોય છે?
- 4ધારો કે એક નક્કર ગોળાની ત્રિજ્યા $R$ અને તેના પરનો વિદ્યુતભાર $Q$ છે. આ ગોળાનું વિદ્યુત ઘનતા વિતરણ $\rho( r )=\frac{ Q }{\pi R ^{4}} \cdot r$ સૂત્ર વડે અપાય છે. આ ગોળાની અંદર ગોળાના કેન્દ્રથી $r _{1}$ અંતરે આવેલા બિંદુ $P$ આગળ વિદ્યુતક્ષેત્રનું મૂલ્ય કેટલું થાય?View Solution
- 5જો એક બીજાથી $d$ અંતરે રહેલા બે વીજભારો $q_1$ અને $q_2$ ડાઈલેક્ટ્રીક અચળાંક $K$ ધરાવતા માધ્યમમાં રાખેલ છે. તો તેટલા સ્થિરવિદ્યુત બળ માટે હવાના માધ્યમમાં બે વીજભારો વચ્ચેનું સમતુલ્ય અંતર કેટલું હોય ?View Solution
- 6$L$ બાજુવાળા ષટકોણના પાંચ શિરોબિંદુ પર $+Q$ વિદ્યુતભાર મૂકેલા છે,તો કેન્દ્ર પર રહેલ $-Q$ વિદ્યુતભાર પર કેટલું બળ લાગે?View Solution
- 7$0.5\, m$ ત્રિજ્યાની અર્ધ વર્તૂળ રીંગ કુલ વિદ્યુતભાર $1.4 \times 10^{-9}\, C$ થી સમાન વિદ્યુતભારીત કરેલ છે. રીંગના કેન્દ્ર આગળ વિદ્યુતક્ષેત્રની તીવ્રતા ........$V/m$ છે.View Solution
- 8આપેલ વિસ્તારમાં વિદ્યુતક્ષેત્ર $\overrightarrow{ E }=\left(\frac{3}{5} E _{0} \hat{i}+\frac{4}{5} E _{0} \hat{j}\right) \frac{ N }{ C }$ વડે આપવામાં આવે છે. $(y-z$ સમતલને સમાંતર) $0.2 \,m^ 2$ ક્ષેત્રફળ ધરાવતી અને $(x-y$ સમતલને સમાંતર) $0.3 \,m^2$ ક્ષેત્રફળ ધરાવતી લંબચોરસ સપાટીમાંથી બતાવેલ ક્ષેત્ર પસાર થતાં મળતા ફ્લક્સનો ગુણોત્તર $a:b$ છે, જ્યાં $a=...........$ છે.View Solution
[ અત્રે $\hat{i}, \hat{j}$ અને $\hat{k}$ એ અનુક્રમે $x, y$ અને $z-$ અક્ષોની દિશામાં એકમ સદિશ છે.]
- 9View Solutionવિદ્યુત બળ રેખાઓની દિશામાં તેના વેગ સાથે ઈલેકટ્રોન તેના વિદ્યુતક્ષેત્રમાં દાખલ થાય તો.......
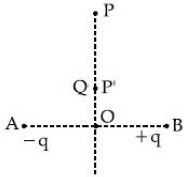
- 10વિધુતભારો $-q$ અને $+q$ એ અનુક્રમે $A$ અને $B$ પર સ્થિત છે જે વિદ્યુતદ્વિધ્રુવી રચે છે. અંતર $AB=2a$ અને $O$ એ આ દ્વિધ્રુવી $AB$ નું મધ્યબિંદુ છે. $OP$ એ આ દ્રિધુવી વિષુવ-રેખા અને $OP$ એ $AB$ લંબ છે. એક વિધુતભાર $Q$ ને $P$ પર મુકવામાં આવે છે, જ્યાં $OP=y$ અને $y > > 2a$. આ વિધુતભાર, $F$ જેટલું સ્થિત વિદ્યુત બળ અનુભવે છે. હવે જો $Q$ ને વિષુવરેખા પર $P$' કે જેથી $OP' = \frac{y}{3}$ સુધી ખસેડવામાં આવે તો $Q$ પરનું બળ ______ ની નજીકનું હશે. $\left( {\frac{y}{3} > > 2a} \right)$View Solution