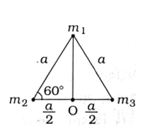
$'a'$ બાજુવાળા સમબાજુ ત્રિકોણ ત્રણ શિરોબિંદુ પર સૂક્ષ્મ દળ $m_1, m_2$ અને $m_3 $ કણો મૂકેલા છે. $m_1 $ માંથી પસાર થતી ઊચાઈને અનુલક્ષીને આ તંત્રની જડત્વની માત્રા શોધો.
Diffcult
Download our app for free and get started
a
\(m_1\)માંથી પસાર થતી ઊંચાઈને અનુલક્ષીને જડત્વની ચાકમાત્રા માટે,
\(m_1\)માંથી પસાર થતી ઊંચાઈને અનુલક્ષીને જડત્વની ચાકમાત્રા માટે,
\({m_1} = \,\,{m_1}\,\) અને \({r_1} = \,\,0\,;\,\,{m_2} = \,\,{m_2}\) અને
\({r_2} = \,\,a\,\,\cos \,\,{60^ \circ } = \,\,\frac{a}{2}\,\,;\,\,{m_3} = \,\,{m_3}\,\)
અને \(\,{r_3} = \,\, - \,\,a\cos \,{60^ \circ } = \,\, - \frac{a}{2}\)
જડત્વ ની ચક્માત્રાં, \(I = {m_1}{r_1}^2 + {m_2}{r_2}^2 + {m_3}{r_3}^2\)
\( = {m_1}{(0)^2} + {m_2}{\left( {\frac{a}{2}} \right)^2} + {m_3}{\left( { - \frac{a}{2}} \right)^2}\)
\( = \frac{{{m_2}{a^2}}}{4} + {m_3}\frac{{{a^2}}}{4}\, = \frac{{{a^2}}}{4}({m_2} + {m_3})\)

Download our appand get started for free
Experience the future of education. Simply download our apps or reach out to us for more information. Let's shape the future of learning together!No signup needed.*
Similar Questions
- 1એક પાતળા સળિયા $MN$ ના છેડા $N$ ને સમક્ષિતિજમાં એવી રીતે જોડેલો છે કે જેથી તે શિરોલંબ સમતલમાં મુક્ત રીતે ફરી શકે. જ્યારે સળિયો સમક્ષિતિજ સાથે $\alpha $ નો ખૂણો બનાવે ત્યારે તેને મુક્ત કરવામાં આવે છે તો ત્યારે છેડા $M$ નો વેગ કેટલો હશે?View Solution

- 2ચાકગતિ કરતા બે પદાર્થનું કોણીય વેગમાન સમાન છે પરંતુ તેમની જડત્વની ચાકમાત્રા અનુક્રમે $I_1$ અને $I_2$ છે. ($I_1$ > $I_2$) કયા પદાર્થની ગતિ ઊર્જા વધુ હશે ?View Solution
- 3જયારે પંખો ચાલુ કરવામાં આવે છે ત્યારે પ્રથમ $3\, sec$ માં $10 $ પરિભ્રમણ કરે છે. પછી બીજી $3\, sec$ માં કેટલા પરિભ્રમણ કરશે $?$ (અહીં અચળ કોણીય પ્રવેગ લાગે છે.)View Solution
- 4$3 \;kg $ દળ અને $ 0.2 \;m$ ત્રિજયાનો એક ઘન ગોળો $7\; m$ ઊંચાઇ એક ઢળતા પાટિયા પરથી ગબડે, તો ચાકગતિઊર્જા ($J$ માં) કેટલી થાય?View Solution
- 5$R$ ત્રિજ્યાનું પૈડું જમીન પર અચળ વેગ $v$ થી ફરે છે. તો પૈડાના સૌથી ટોચ પરના બિંદુનો સંબંધિત પ્રવેગ તેના સૌથી નીચેના બિંદુ ની સાપેક્ષમાં શું હશે ?View Solution
- 6$M$ દળ અને $R$ ત્રિજયાવાળો નકકર નળાકાર $L$ લંબાઇના ઢાળ પરથી સરકયા સિવાય ગબડે છે.ઢાળની ઊંચાઇ $h$ છે.જયારે નળાકાર ઢાળના તળિયે પહોંચે ત્યારે તેના દ્રવ્યમાન-કેન્દ્ર નો વેગ કેટલો હશે?View Solution
- 7ત્રણ સમાન પાતળી લાકડી જેની લંબાઈ $l$ અને દળ $M$ છે તેને જોડીને $H$ અક્ષર બનાવવામાં આવે તો તંત્ર ની $H $ ની કોઈ એક બાજુને અનુલક્ષીને જડત્વની ચાકમાત્રા કેટલી થાય $?$View Solution
- 8$10 \,cm$ ત્રિજ્યા અને $2 \,kg$ દળ ની એક વર્તુળાકાર તકતી સરક્યાં વિના $2 \,m / s$ ની ઝડપે ગબડ છે. તકતી ની કુલ ગતિઊર્જા ........... $J$ થાય?View Solution
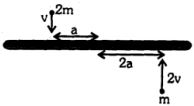
- 9$8\ m$ દળ અને $ 6\ a $ લંબાઇનો નિયમિત સળિયો સમક્ષિતિજ ટેબલ પર મૂકેલો છે બે બિંદુવત દળ $ m$ અને $2\ m$ અનુક્રમે $2v$ અને $v$ ઝડપથી ગતિ કરે છે અને સળિયાને અથડાઇને અથડામણ બાદ તેની સાથે ચોટી જાય છે.અથડામણ બાદ સળિયાના દ્રવ્યમાન કેન્દ્રની ઝડપ ગણો.View Solution
- 10$V _{ CM }=2\; m / s , m =2\;kg , R =4 \;m$ જ્યારે રીંગ સંપૂર્ણ ગબડે ત્યારે તેનું કોણીય વેગમાન ઉદગમબિંદુને અનુલક્ષીને ($kgm ^{2} / s$ માં)View Solution