- Prove the theorem of perpendicular axes.
- Prove the theorem of parallel axes.
Download our app for free and get started
- According to the theorem of perpendicular axes the moment of inertia of a planar body (lamina) about an axis perpendicular to its plane is equal to the sum of the moments of inertia of the lamina about any two mutually perpendicular axes in its plane and intersecting each other at the point where the perpendicular axis passes through it. let us consider a physical body with center O and a point mass m,in the x-yplane at (x, y) is shown in the following figure:
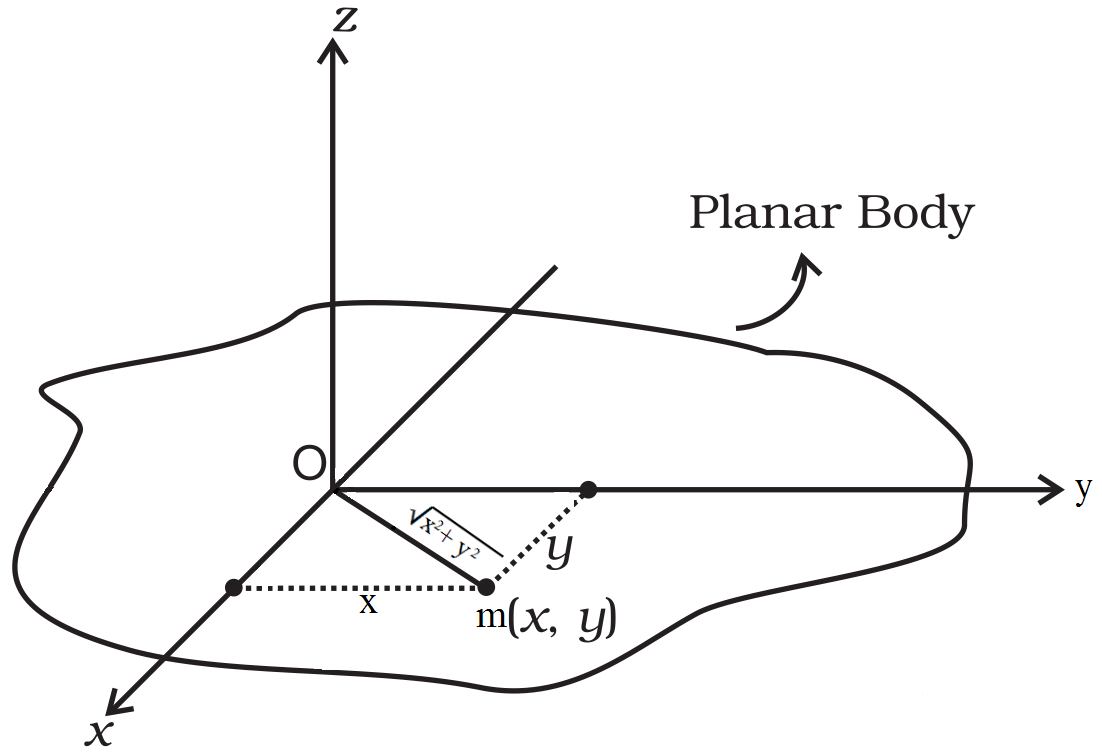
Moment of inertia about x-axis, $I_x = mx^2$
Moment of inertia about y-axis, $I_y = my^2$
Moment of inertia about z-axis, $I_z = m(x^2 + y^2)^{1/2}$
$I_x + I_y = mx^2 + my^2$
$= m(x^2 + y^2)$
$= m [(x^2 + y^2)^{1/2}]^{1/2}$
$I_x + I_y = I_z$
Thus, the theorem is verified.
- According to the theorem of parallel axes the moment of inertia of a body about any axis is equal to the sum of the moment of inertia of the body about a parallel axis passing through its center of mass and the product of its mass and the square of the distance between the two parallel axes.
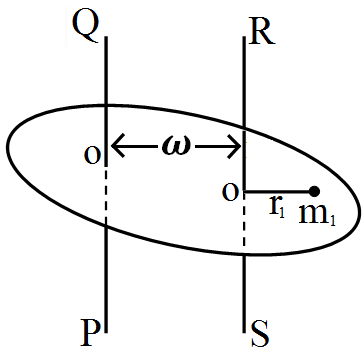
Suppose a rigid body is made up of n number of particles, having masses $m_1, m_2, m_3, … ,m_n$, at perpendicular distances $r_1, r_2, r_3, … , r_n$ respectively from the center of mass O of the rigid body.
The moment of inertia about axis RS passing through the point O,
$\text{I}_{\text{RS}}=\sum\limits^\text{n}_{\text{i}=1}=\text{m}_{\text{i}}\text{r}_{\text{i}}^2$
The perpendicular distance of mass $m_i$ from the axis $QP = a+ r_i$
$\text{I}_{\text{QR}}=\sum\limits^\text{n}_{\text{i}=1}\text{m}_{\text{i}}(\text{a}+\text{r}_\text{i})^2$
$\text{I}_{\text{QR}}=\sum\limits^\text{n}_{\text{i}=1}\text{m}_{\text{i}}(\text{a}^2+\text{r}_\text{i}^2+2\text{ar}_{\text{i}})$
$\text{I}_{\text{QR}}=\sum\limits^\text{n}_{\text{i}=1}\text{m}_{\text{i}}\text{a}^2+\sum\limits^\text{n}_{\text{i}=1}\text{m}_{\text{i}}\text{r}_\text{i}^2+\sum\limits^\text{n}_{\text{i}=1}\text{m}_{\text{i}}2\text{ar}_{\text{i}}$
$\text{I}_{\text{QR}}=\text{I}_{\text{RS}}=\sum\limits^\text{n}_{\text{i}=1}\text{m}_{\text{i}}\text{a}^2+2\sum\limits^\text{n}_{\text{i}=1}\text{m}_{\text{i}}\text{ar}^2_{\text{i}}$
We know, the moment of inertia of all particles about the axis passing through the center of mass is zero.
$2\sum\limits^\text{n}_{\text{i}=1}\text{m}_{\text{i}}\text{ar}_{\text{i}}=0$
as $\text{a}\neq0$
Therefore, $\sum\text{m}_{\text{i}}\text{r}_{\text{i}}=0$
Also,
Therefore, $\sum\text{m}_{\text{i}}$
= M; M = Total mass of the rigid body.
Therefore, $IQP = IRS + Ma^2$
Therefore the theorem is verified.

Download our appand get started for free
Experience the future of education. Simply download our apps or reach out to us for more information. Let's shape the future of learning together!No signup needed.*
Similar Questions
- 1View Solution
- Prove the theorem of perpendicular axes.
- Prove the theorem of parallel axes.
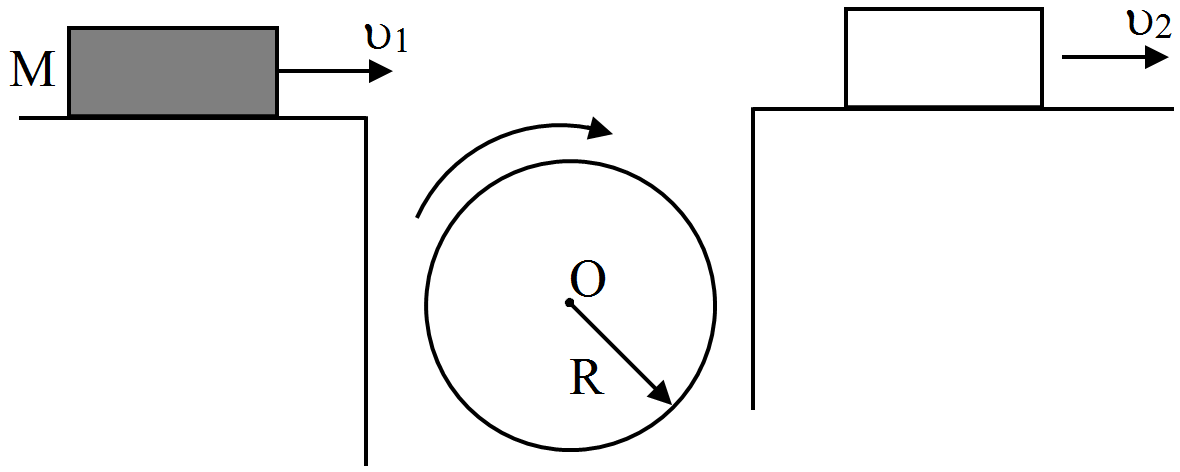
- 2A block of mass M is moving with a velocity $v_1$ on a frictionless surface as shown in fig. It passes over to a cylinder of radius R and moment of inertia I which has fixed axis and is initially at rest. When it first makes contact with the cylinder, it slips on the cylinder, but the friction is large enough so that slipping ceases before it losses contact with the cylinder. Finally it goes to the dotted position with velocity $v_2$ compute $v_2$ in terms of $v_1, M, I$ and $R$.View Solution
- 3From a uniform circular disc of diameter d, a circular hole of diameter $\frac{\text{d}}{6}$ and having its centre at a distance of $\frac{\text{d}}{4}$ from the centre of the disc is scooped out. Find the centre of mass of the remaining portion.View Solution
- 4Establish the relation $\theta=\omega_0\text{t}+\frac{1}{2}\alpha\text{t}^2$ where the letters have their usual meanings.View Solution
- 5Separation of Motion of a system of particles into motion of the centre of mass and motion about the centre of mass: Show $\frac{\text{dL}}{\text{dt}}=\sum\text{r}'_\text{i}\times\frac{\text{dp}'}{\text{dt}}$ Further, show that $\frac{\text{dL}'}{\text{dt}}=\tau'_\text{ext}$ where $\tau'_\text{ext}$ is the sum of all external torques acting on the system about the centre of mass. (Hint: Use the definition of centre of mass and third law of motion. Assume the internal forces between any two particles act along the line joining the particles)View Solution
- 6A disc of mass $5kg$ and radius $50cm$ rolls on the ground at the rate of $10ms^{-1}$. Calculate the K.E. of the disc. $\Big(\text{Given}:\text{I}=\frac{1}{2}\text{MR}^2\Big)$View Solution
- 7View SolutionA 6.5m long ladder rests against a vertical wall reaching a height of 6.0m. A 60kg man stands half way up the ladder.
- Find the torque of the force exerted by the man on the ladder about the upper end of the ladder.
- Assuming the weight of the ladder to be negligible as compared to the man and assuming the wall to be smooth, find the force exerted by the ground on the ladder.
- 8View SolutionDefine radius of gyration and give the physical significance of moment of inertia.
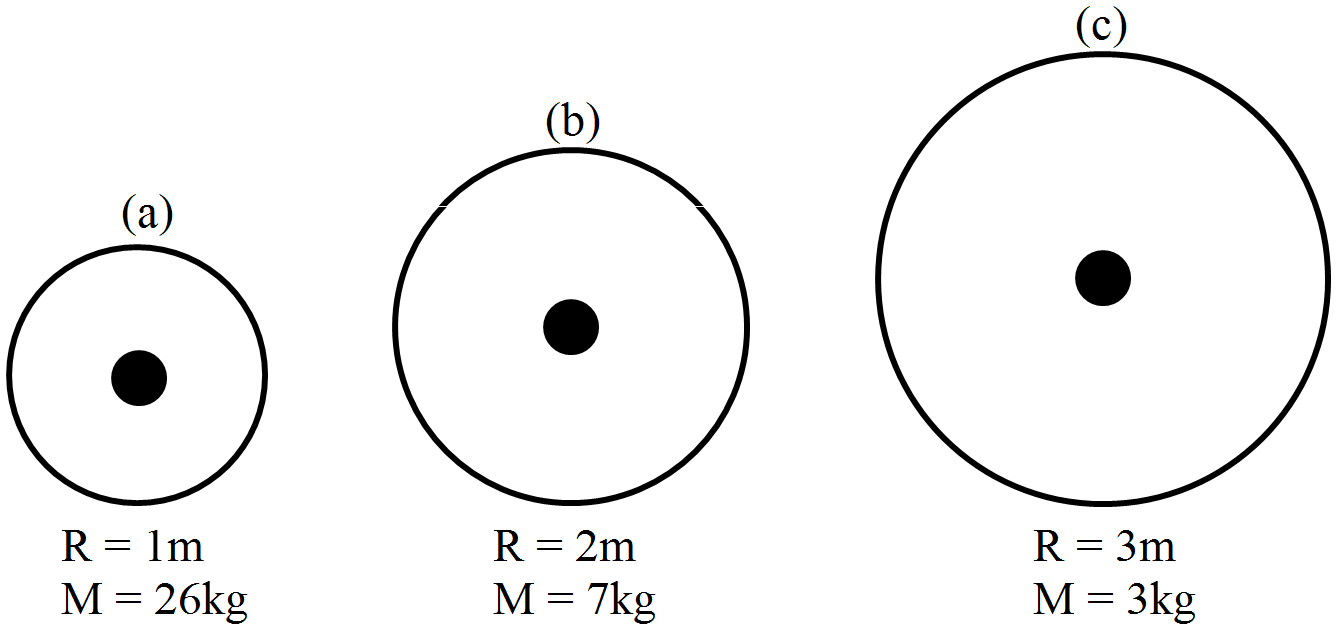
- 9View SolutionFigure shows three uniform discs, along with their radii R and masses M. Rank the discs according to their rotational inertia about their central axes, greatest first.
- 10View SolutionA wheel in uniform motion about an axis passing through its centre and perpendicular to its plane is considered to be in mechanical (translational plus rotational) equilibrium because no net external force or torque is required to sustain its motion. However, the particles that constitute the wheel do experience a centripetal acceleration directed towards the centre.How do you reconcile this fact with the wheel being in equilibrium? How would you set a half-wheel into uniform motion about an axis passing through the centre of mass of the wheel and perpendicular to its plane? Will you require external forces to sustain the motion?